Simultaneous Localization And Mapping
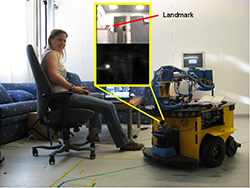 |
Visual Simultaneous Localization And Mapping (SLAM) is the task of automatically creating a map of the environment from image data without knowing the current exact position of the camera. It is usually of interest for mobile robots but can also be applied to hand-held cameras. We developed a visual SLAM system which finds salient landmarks, tracks them over frames and redetects them when returning to a known position. Active camera control improves the system performance. |