Extended Haptic Retargeting
Project Team
|
Supervision |
Introduction
In our bachelor's project we designed a program based on Azmandian's Haptic Retargeting study, which we replicated and extended by adding vibrotactile feedback.
Technology
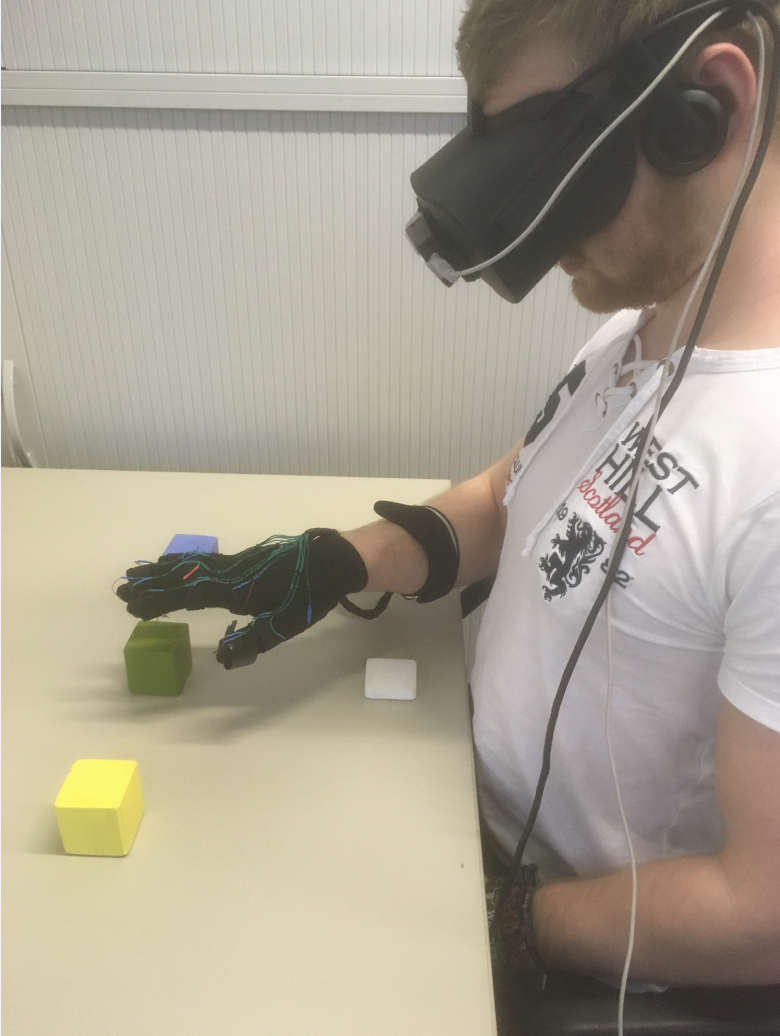
The vibrotactile Haptic Glove used in our project was developed by researchers from the University of Hamburg. It has 14 vibrating motors in the fingers and on the palm, which are activated by touching certain virtual objects. Those vibrations differ in strength and length and can be individually activated.
We also used the Oculus Rift for a VR experience and a Leap Motion strapped to the Oculus for hand tracking.

Goal/Motivation:
Our goal was to enhance Azmandian's Haptic Retargeting study by using the vibrotactile feedback provided by the Haptic Glove. We also wanted to find out how far we can go with manipulating the environment so that the cubes look contrary to what the participants feel. We tried to trick the user by supporting varying shapes for the virtual and the real cubes.
Functionality
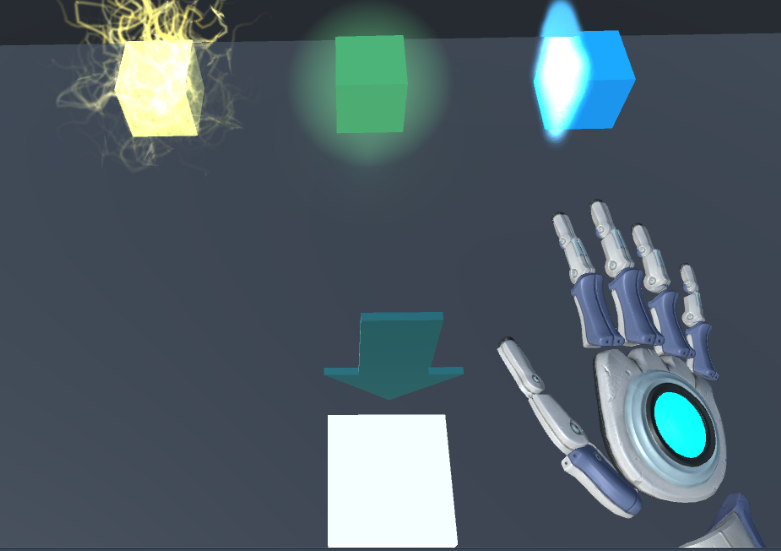
In our study, the users had to touch three different virtual cubes, which were aligned with real ones standing in front of them. In three of our four conditions, a body warping technique was used, which changed the users' virtual hand position. The users had to countersteer in order to reach the desired virtual cube by moving their hand in the other direction. By doing so, the user's hand ended up on the real middle cube all the time, while giving the user the impression of touching three different cubes. This effect was extended by applying moving textures to the virtual cubes and letting the vibration motors of the glove represent them.
Outcome
Statistical analysis could not prove that adding textures with vibrations to our scene significantly enhances the users' sense of presence. This could be due to the gloves being too inaccurate or the sample being too small. Nevertheless, it could not be proven that vibrations or using warping made our project less realistic either.
Outlook
It would be very helpful to continue our study with a more precise Haptic Glove, which makes it possible to have more accurate textures and vibration patterns. Furthermore, a tracking system for the real cubes would ease the difficulties we had with aligning virtual and real cubes, which had to be done for each person individually before each trial. A possible solution would be to rewrite our program using a Kinect.
Project Code
To take a look at our project code, please click here.