Immersive Robot Control
To design a reliable, intuitive and comfortable user interface in robotics is a challenging task. At the current state- of-the-art we can benefit from the advances of both sides, user interface technologies and robotic systems.
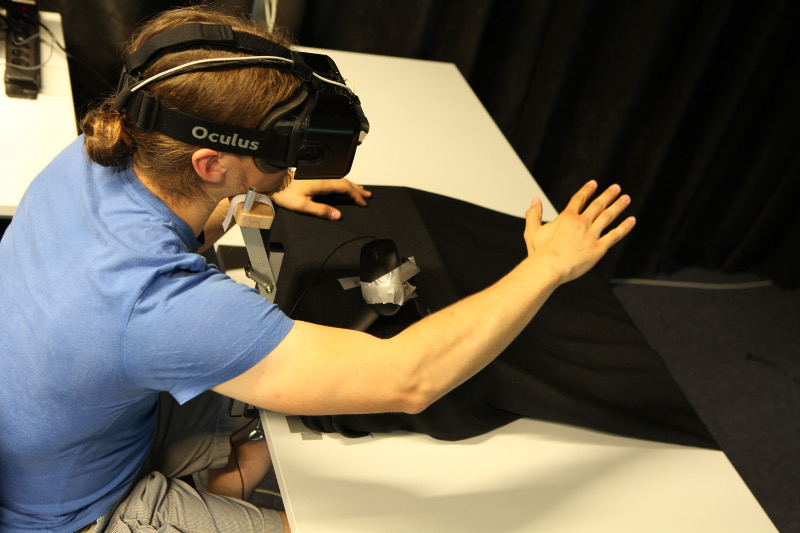
In this project we try to setup a heterogeneous, extendible and immersive system for controlling a distant robot via network with the long-term objective to human-robot or human-robot-human collaboration. Current technologies from virtual reality (VR) are applied to the implementation of a natural user interface with Unity3D. In the field of robot control the robot operating system (ROS) is utilized, due to its wide acceptance and its freely available modular components. The focus of this work lies on grasping control methods by mid-air gestures for a robotic hand.
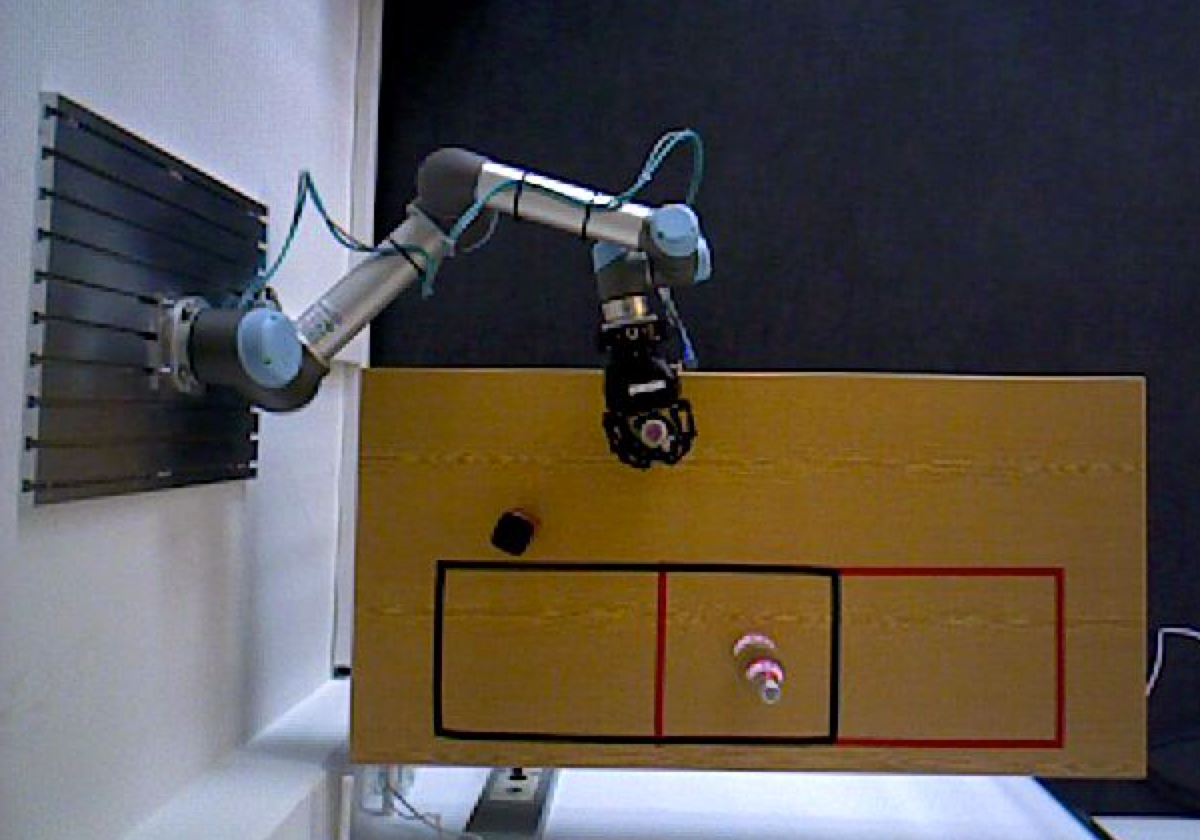
For a first test a Universal Robot UR5 robotic arm and a Robotiq 3-finger adaptive gripper is implemented at the ROS-side for control and at the user-interface-side using Unity3D.
