Natural Interaction with Modular Robots
Modular robots fascinate by their simplicity. They are looking cute and if they are in locomotion the rhythmic movements can be very attracting. The control algorithms behind this require adequate tuning of several parameters.
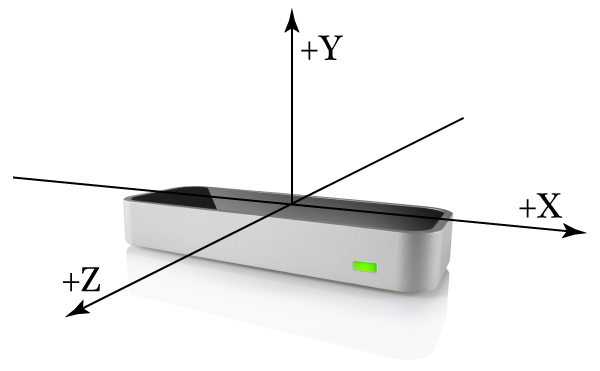
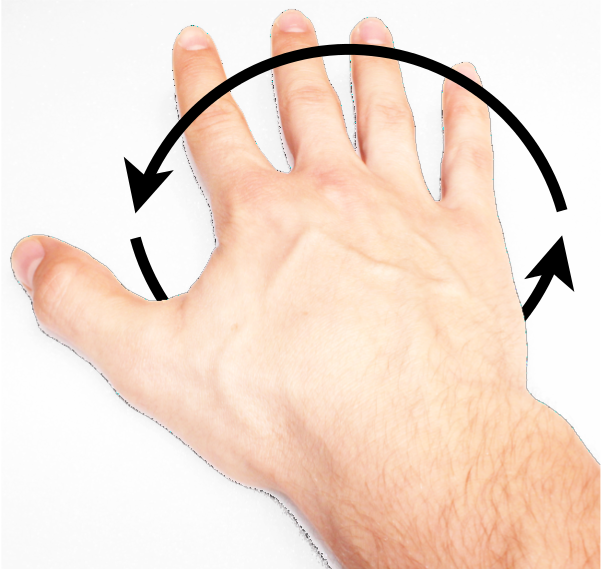
In this project we try to create a high level control method that is sensitive to hand gestures, intuitive to use and as well produces stable locomotion that allows for remote-controlling a snake-like modular robot. Current sensor devices like the Leap Motion are ideal for this task. Its small size and the possibility to use it with a mobile device (Android tablet) make it appropriate for designing a smart remote control.
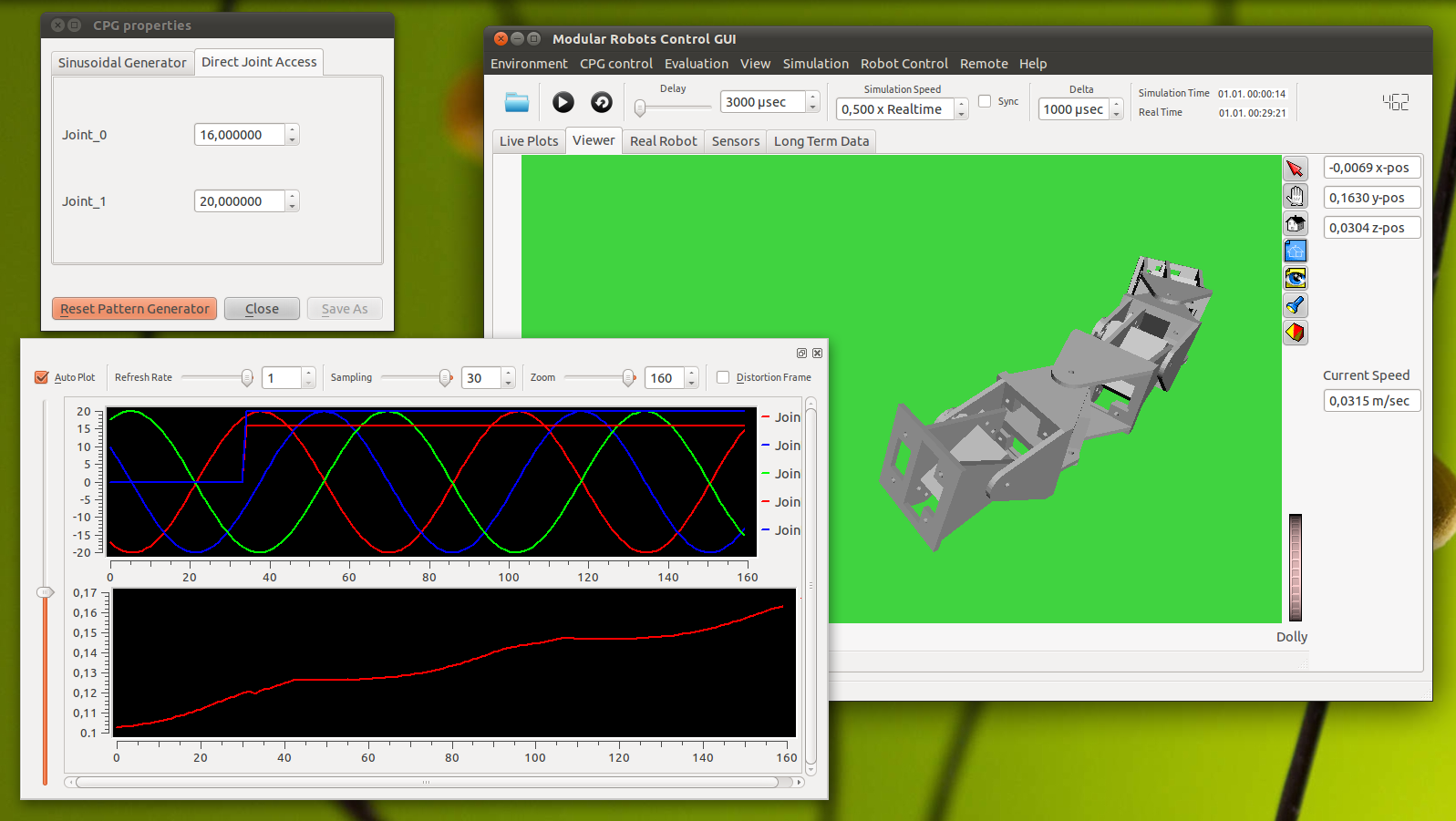
For a first test the remote is integrated to a modular robot simulation system.
Contact
Dipl. Inf. Dennis Krupke