Scale & Walk
Scale And Walk
Supervision
Project Team
|
Ziel
Virtual Reality Headsets, wie z.B. die HTC Vive, ermöglichen es dem Benutzer, sich in der virtuellen Welt durch reale Bewegung fortzubewegen. Dies stellt allerdings die Technologie vor neue Herausforderungen, da der real begehbare Raum(Playarea) meist deutlich kleiner ist als der virtuelle Raum. Skalierungstechniken ermöglichen es, weite Distanzen in der virtuellen Welt zurückzulegen, indem die virtuelle Größe des Benutzers manipuliert wird. In diesem Projekt haben wir zwei verschiedene Skalierungstechniken entwickelt und evaluiert.
Umsetzung
Wir unterscheiden in zwei verschiedene Skalierungstechniken: das automatische und das selbstbestimmte Skalieren. Beim selbstbestimmten Skalieren kann der Benutzer seine virtuelle Größe eigenständig durch Benutzung des Vive-Controllers bestimmen. Beim automatischen Skalieren wird die virtuelle Größe automatisch anhand einer Funktion während der Fortbewegung zu einem Ziel hin bestimmt. Als Kontrollbedingung wurde beschleunigtes Laufen verwendet, in der die Fortbewegungsgeschwindigkeit in Zielrichtung hin manipuliert wurde.
Skalierungsfunktionen beschreiben die Form, in der der Benutzer in Abhängigkeit von der Zeit oder Distanz wächst. Das selbstbestimmte Skalieren verwendete eine asymmetrische intervallbasierte Sigmoidfunktion. Bei der automatischen Skalierung wurde eine Parabelfunktion der Form: f(x) = max(ax² + bx + c, c) verwendet, wobei c die virtuelle Startgröße ist und a sowie b in Abhängigkeit von der zu überwindenden virtuellen Distanz und der realen Distanz bis zum Ende der Playarea berechnet werden.
Studie & Evaluation
Die Studie wurde mit einer HTC Vive HMD und einem HTC Vive Controller durchgeführt. Der Raum, in dem sich die Probanden bewegen konnten, betrug 4x4m (Figure 2). Die virtuelle Welt bestand aus einer Stadtszene, in der sich die Probanden auf einer Kreuzung entlang bewegen konnten (Figure 1).
In der ersten Phase eines Blocks starteten die Versuchsteilnehmer auf einer Kreuzung in der Mitte des Stadtszenarios. Auf der Straße wurde dem Teilnehmer ein Ziel in einer von fünf Distanzen präsentiert(Figure 3). Abhängig von der aktuellen Technik musste die Versuchsperson beim automatischen Skalieren und beschleunigten Laufen lediglich zum Ziel laufen. Beim selbstbestimmten Skalieren musste sie sich mit dem Controller auf die maximale Größe skalieren, zum Ziel laufen und sich wieder auf die Ausgangsgröße zurück skalieren. Nachdem das Ziel erreicht wurde, wurde die Stadtszene ausgeblendet. Mithilfe des Controllers schätzte die Versuchsperson die zurückgelegt Distanz ein (Figure 4).
In der zweiten Phase des Blocks explorierten die Teilnehmer die Stadt für 2 Minuten mit der jeweiligen Technik und es wurde mit der Think-Aloud Methode qualitatives Feedback erhoben
Evaluiert wurden die Skalierungstechniken anhand folgender Kriterien: Usability, Simulator Sickness und räumliches Verständnis. Die Ergebnisse legen nahe, dass das automatische Skalieren in der jetzigen Form schlechter abschneidet als das selbstbestimmte Skalieren und die Kontrollbedingung. Das selbstbestimmte Skalieren stellt jedoch eine gleichwertige Alternative zum beschleunigten Laufen dar.
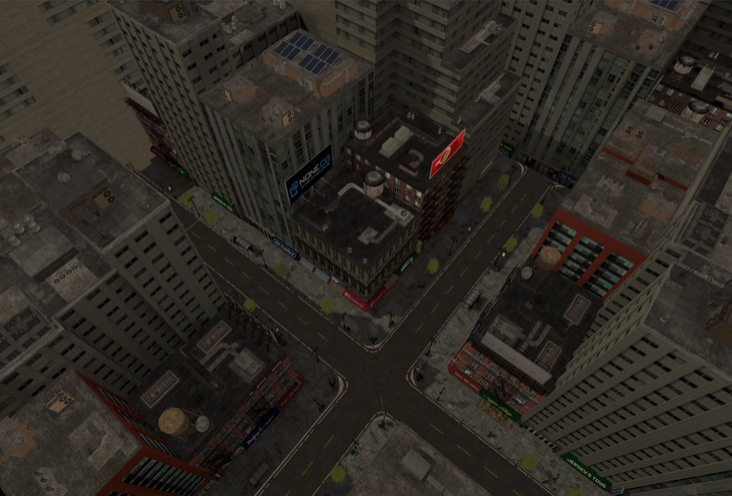
(Figure 1): Stadtszene Vogelperspektive

(Figure 2): Raum in dem das Experiment stattgefunden hat
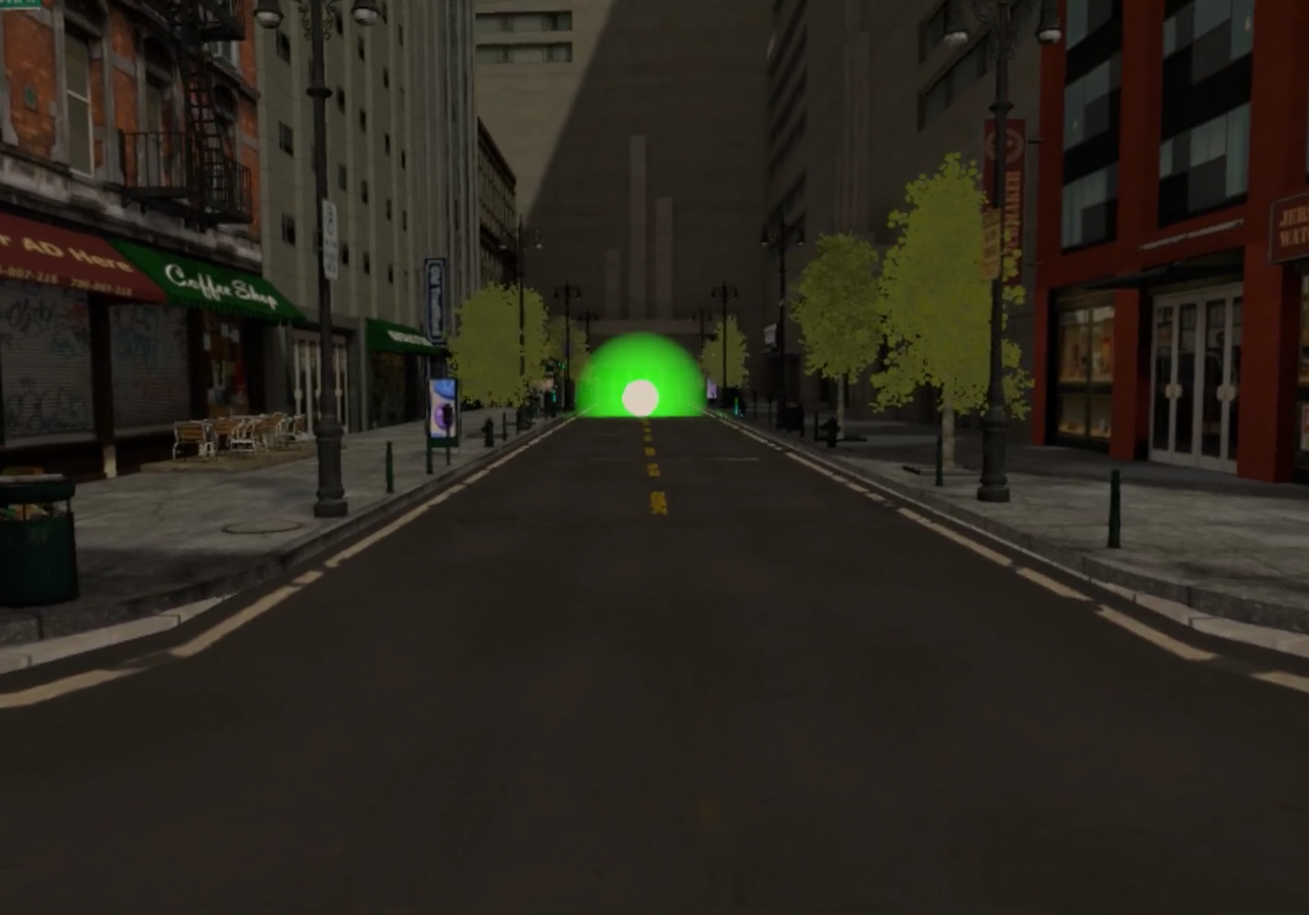
(Figure 3): Beispielziel, zu dem in der ersten Phase eines Blockes gegangen werden muss
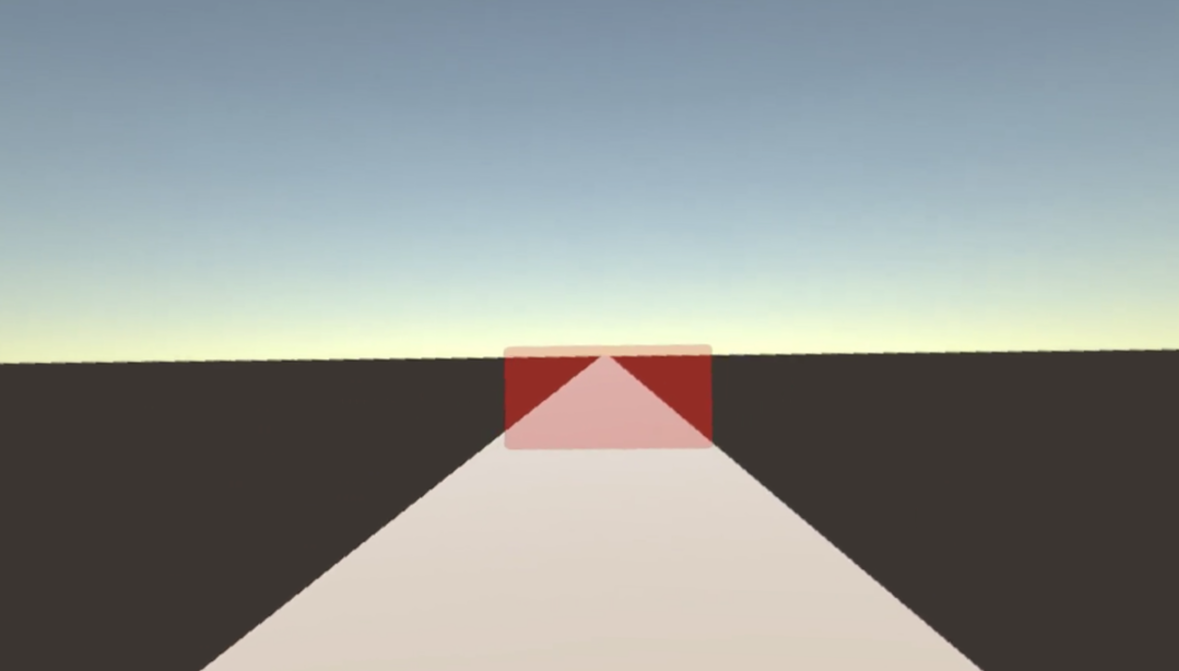
(Figure 4): Welt, in der mithilfe einer transparenten Wand die gelaufene Distanz in der Stadtszene eingeschätzt wurde.