NICO - Technical Details
The NICO robot is designed as a highly flexible and modular platform for multimodal human-robot interaction and neuro-cognitive
Redesign mainly took place in the upper body including
- the neck and the head, with a strong emphasis on the audio and visual sensory modalities and a display for facial expressions as well as
- the shoulders, the arms, and the hands, with a focus on advanced manipulation.
Degrees of Freedom (DoF)
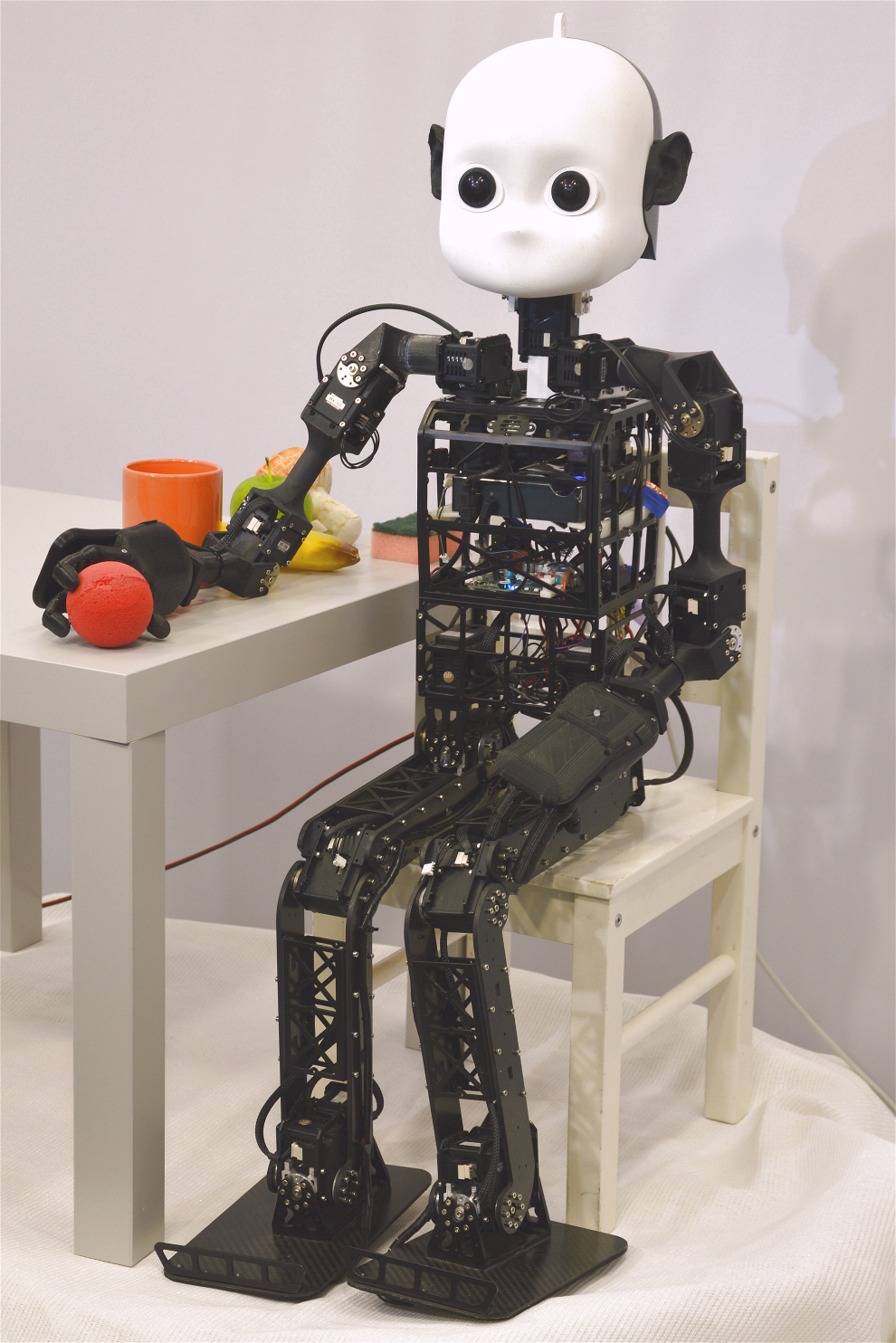 In total, the robot has 30 DoF which are distributed as follows:
In total, the robot has 30 DoF which are distributed as follows:
- Two DoF can perform yaw and pitch movements of the head.
- The shoulders feature a tight cluster of motors that offer three DoF, mimicking the physiology of the human shoulder ball joint.
- One degree of freedom allows bending at the elbows.
- Seed Robotics SR-DH4D articulated hands
add four DoFs for wrist rotation, wrist flexion, controlling the two index fingers, and controlling the opposable thumb. - Each leg includes three DoF in the hip joint, one DoF in the knee and two DoF in the foot. Due to its modular design, the legs can be removed at the hip, if not required, and the torso can be mounted on a wheeled platform.
Head
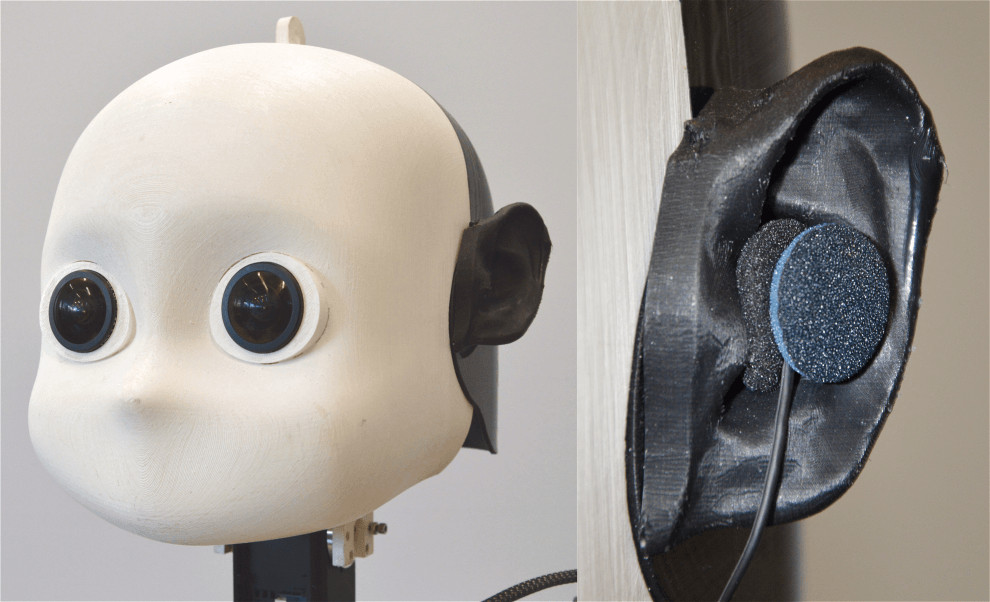 The outer shell of the robot’s head is based on the open-source design of
The outer shell of the robot’s head is based on the open-source design of
Emotion Expression
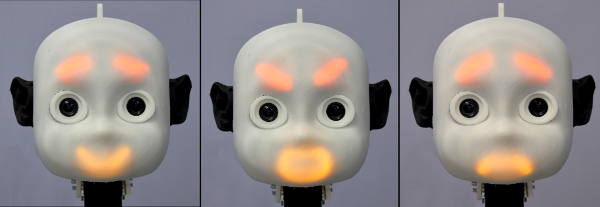 NICO’s head is also fitted with three LED arrays in the mouth and eye areas. These arrays enable the NICO robot to show stylized facial expressions during human-robot interaction
NICO’s head is also fitted with three LED arrays in the mouth and eye areas. These arrays enable the NICO robot to show stylized facial expressions during human-robot interactionUpper Body
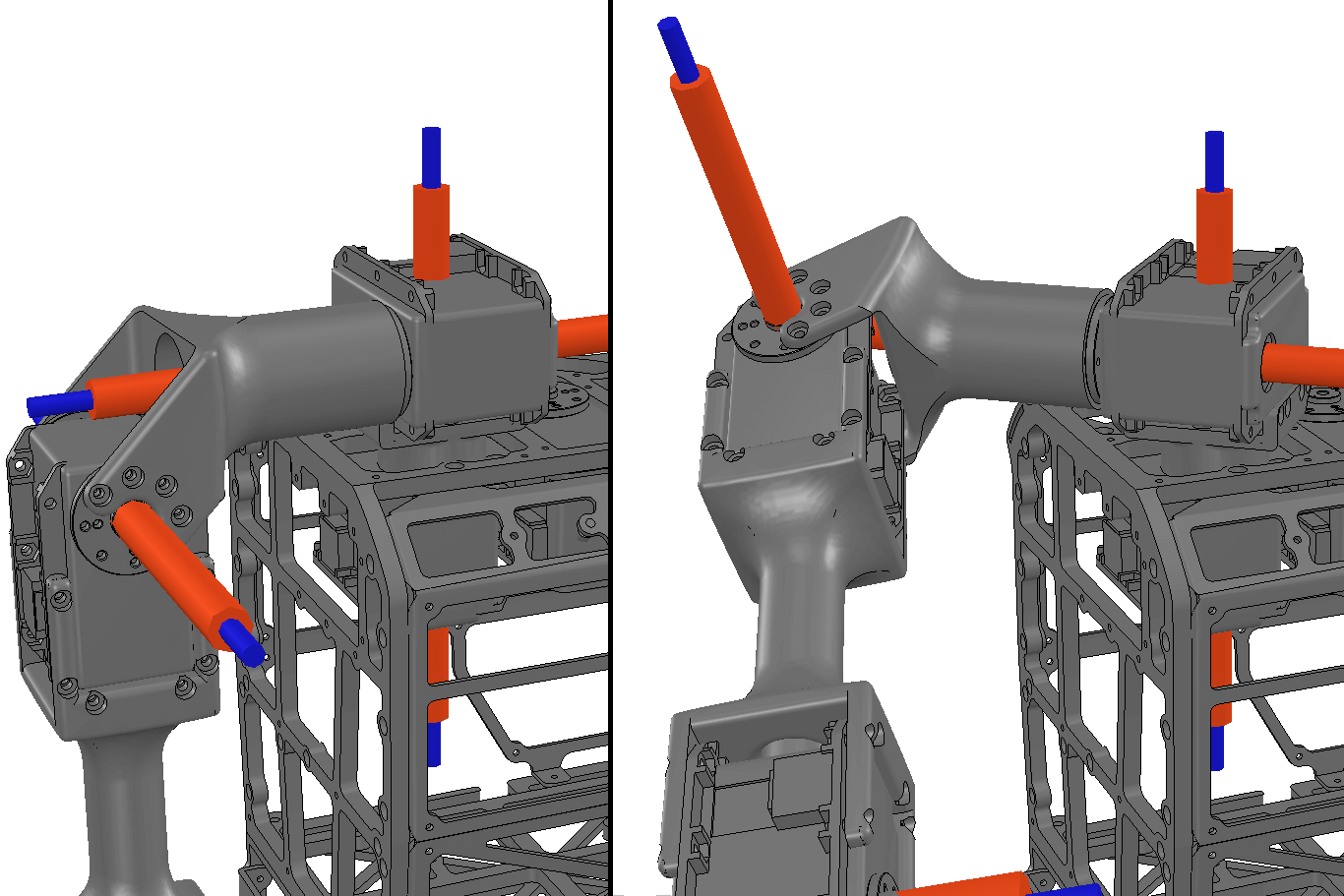 The open design of NimbRo-OP allowed redesigning the torso and shoulder area including a modified placement of motors inside the torso, improving the robot’s working space to enable better bi-manual manipulation in front of the body.
The open design of NimbRo-OP allowed redesigning the torso and shoulder area including a modified placement of motors inside the torso, improving the robot’s working space to enable better bi-manual manipulation in front of the body.
We have moved the first joint inside the space of the torso frame to gain space and mounted the second
For multimodal human-robot interaction, the human-like kinematics of the arm and hand provides the added advantage of enabling the robot to learn grasping and gestures from human demonstration.
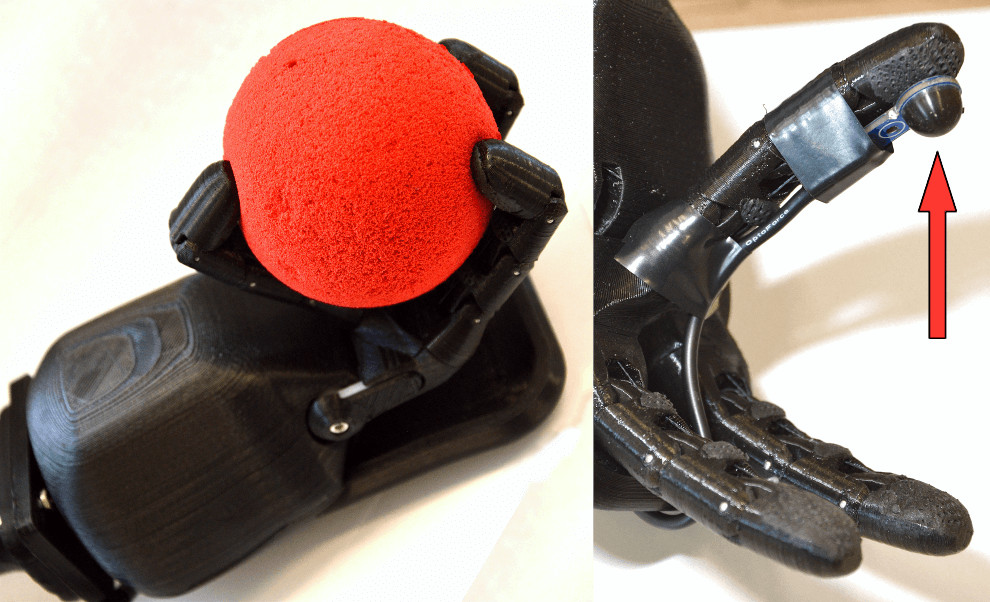 For the hands, we integrated the three-fingered SR-DH4D hands from Seed Robotics into the NICO. Their tendon-based mechanics with force feedback allow for segmented, bendable fingers with three joints per finger and thus for seamless handling of objects with different shapes. The two index fingers are controlled together as a single DoF as is the opposable thumb, which reduces the complexity of the grasping or object manipulation while still preserving the advantages of a fingered hand over a rigid gripper. The hands use the Dynamixel bus system and protocol and can, therefore, be seamlessly integrated into the control framework of the NICO robot.
For the hands, we integrated the three-fingered SR-DH4D hands from Seed Robotics into the NICO. Their tendon-based mechanics with force feedback allow for segmented, bendable fingers with three joints per finger and thus for seamless handling of objects with different shapes. The two index fingers are controlled together as a single DoF as is the opposable thumb, which reduces the complexity of the grasping or object manipulation while still preserving the advantages of a fingered hand over a rigid gripper. The hands use the Dynamixel bus system and protocol and can, therefore, be seamlessly integrated into the control framework of the NICO robot.