Simulation of Micro Unmanned Aerial Vehicles
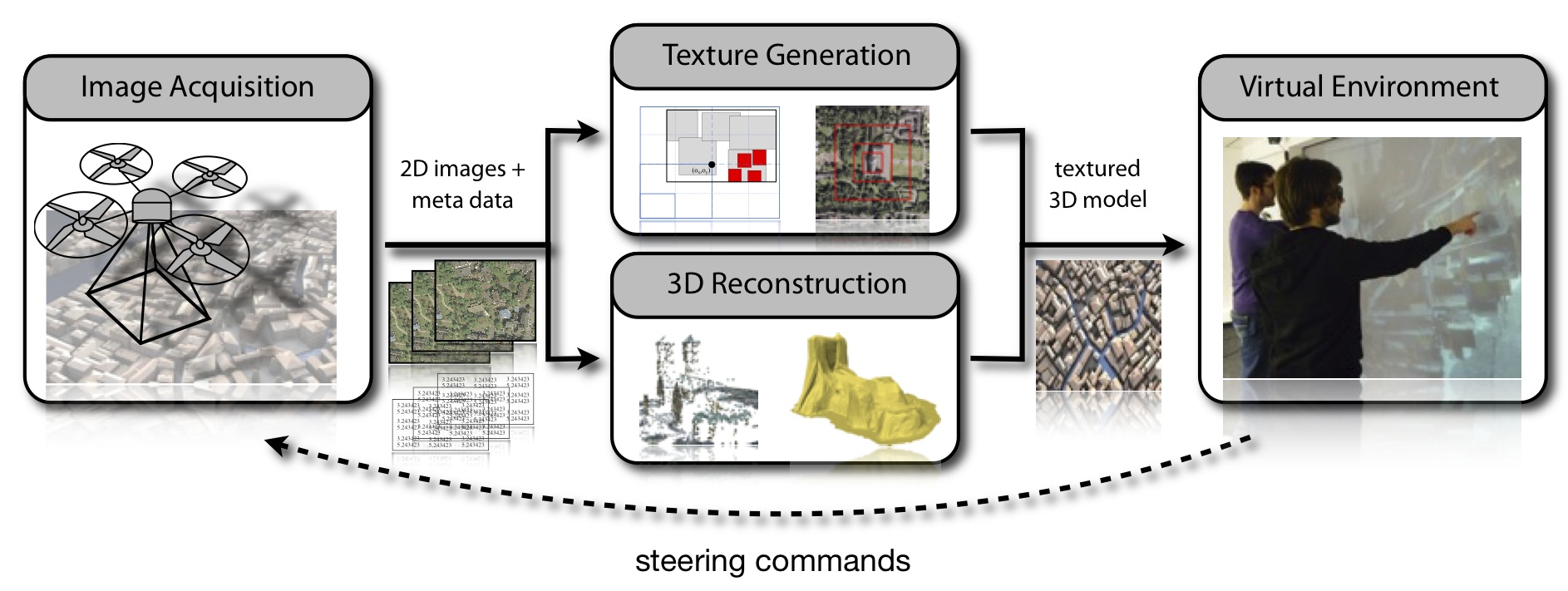
We work on novel approaches to interactively generate a virtual environment (VE) as reconstruction of the real world by using a swarm of autonomously flying miniature unmanned aerial vehicles (MUAVs). In our system each of the MUAVs is equipped with advanced network as well as different sensor technologies, which allow to capture images from low altitudes and to transfer those to a ground station, where the captured environment is reconstructed. At the ground station, the virtual 3D reconstruction is displayed in different virtual reality (VR) environments in which operators can not only explore the VE, but also interactively control the 3D reconstruction process. Therefore, virtual representations of the real MUAVs are visually integrated in the VE according to their real world position and orientation. The operator can manually steer these virtual MUAVs leading to corresponding movements of their real world counterparts.