Knowledge Technology
Department of InformaticsKnowledge Technology
Photo: UHH/Denstorf
9 November 2023
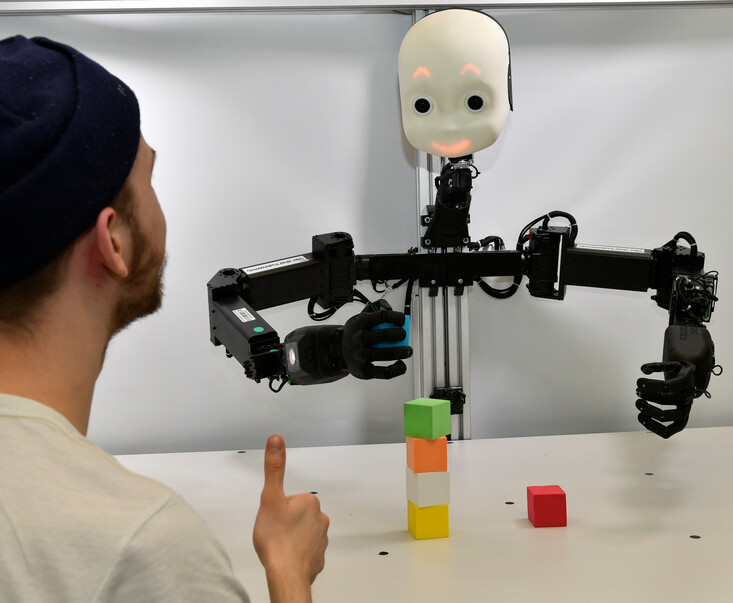
The Knowledge Technology group at the University of Hamburg announces the official release of the NICOL robot environment for the CoppeliaSim simulator. The open-source research platform NICOL, designed to support the evaluation of machine learning algorithms, features a semi-humanoid design with two redundant manipulators and advanced sensory capabilities. It includes emotion-expressing features in its head and force-pressure sensors in its anthropomorphic hands, underlining its versatility for both manipulation tasks as well as human-robot-interaction.
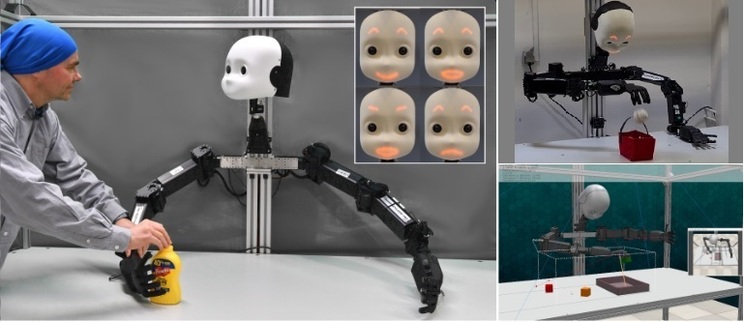
The release of the NICOL CoppeliaSim repository is accompanied by a scientific paper publication in the IEEE Access journal that investigates the features and kinematic capabilities of the robot. The repository includes a Python API, providing users with comprehensive control over the NICOL robot within the CoppeliaSim environment, fostering a sophisticated environment for research and experimentation. The repository features an exemplary demo for a human-robot-interaction scenario that is fully transferable to the physical robot hardware.
The Knowledge Technology group invites researchers to explore the NICOL robot simulation, currently available on GitHub.
The NICOL paper is published in IEEE Access now! It can be found here.

